サーボモーターという言葉を日常生活の中で耳にする機会は、あまり多くないかもしれません。しかし現代の私たちの生活を支えている各種の製品には、常により高い性能と品質が求められており、それを実現するためには高精度かつ高速の産業用ロボットや工作機械、各種製造装置が不可欠です。この高精度・高速を支える動力となっているのがサーボモーターです。
サーボモーターとは何か?
サーボモーター (Servomotor) とは、指示通りに正確に位置、速度などを制御できるサーボ機構を構成するモーターのことです。広義では電動モーターだけでなく油圧モーターなども含め、位置、速度などを制御できるモーター全体のことですが、現代では一般的に、エンコーダ(検出器)を備え、コントローラーとドライバーによってフィードバック制御される電動モーターのことを指します。
サーボモーターにはラジコン模型などのホビー用途向けのものもありますが、ここでは産業用ロボットをはじめとする産業機械向けのものについて解説します。
【関連記事】
『DCモーターとは?ACモーターとの違いは?特徴やメリット・デメリットを紹介』
サーボの語源
サーボモーターの「サーボ」は、ラテン語で「召使い」「奴隷」を意味する「Servus」(英語では「Servant」)が語源です。ご主人の指示に従って忠実に働く召使いという意味合いです。ちなみに制御技術において制御される対象のことをスレーブ(slave)と呼ぶことがありますが、これも同様に「Servus」に由来しています。
サーボモーターの特徴
サーボモーターの特徴はその語源の通り、指示に従って高精度な位置、速度、回転力(トルク)で動くことです。そのため、高速かつ精密な動作を要求される現代の産業機械には不可欠な存在となっています。
サーボモーターにはDC(直流)サーボモーターもあり、産業機械向けでも以前は油圧、空気圧と並んで使われていましたが、現在の産業機械向けではAC(交流)サーボモーターが主流となっています。ACサーボモーターは小型で構造が単純、摩耗しやすいブラシがなく信頼性が高いなどのメリットがあり、制御技術やパワー半導体技術の進歩により広く使われるようになりました。
サーボモーターの構造
ACサーボモーターには、同期モーターを使用した同期型(SM型)と誘導モーターを使用した誘導型(IM型)があり、永久磁石の有無が異なります。現在では永久磁石が高性能化したため同期型が主流となっています。ここでは同期型ACサーボモーターの構造について解説します。
ステーター(固定子)
コアとなる鉄心に電線を巻き付けたコイルになっています。電線に電流を流すとステーターが電磁石になり、交流電流で向きと大きさが交互に変わることで、電磁石の極性も切り替わります。
ローター(回転子)
モーターの軸と一体の部分で、強力な永久磁石が埋め込まれています。ステーターの電磁石の極性が切り替わることによって、ローターの永久磁石が引き付けられたり反発させられたりしてローターが回転します。
エンコーダー
スリットを刻んだ円盤と光センサーを内蔵しており、円盤がローターとともに回転すると光センサーがスリットの数をカウントして電気信号に変換し、回転速度や位置を検出します。
サーボモーターを動かす仕組み
予め設定されたプログラムに従ってプログラマブルコントローラーが指示を出し、それを受けてサーボアンプがモーターを動かします。そのモーター動作状況をエンコーダーが検出し、信号をサーボアンプ経由でプログラマブルコントローラーに送ります。動作状況が、指示通りかどうかを確認し、誤差があれば再度プログラマブルコントローラーからドライバーを経由でモーターに指示が出され、それが目標とする動作と一致するまで繰り返されることで精度の高い制御を行います。
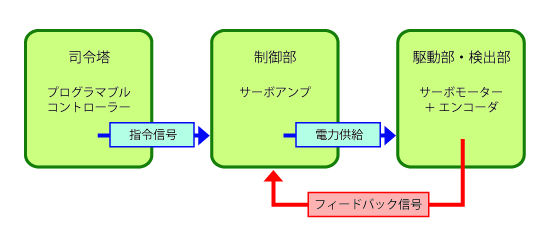 【図1】クローズド・ループ制御の仕組み
【図1】クローズド・ループ制御の仕組み
プログラマブルコントローラー(PLC)
モーターを動かす司令塔の役割を果たすのがプログラマブルコントローラーです。サーボモーターを動かす位置・速度・回転力の目標値を出力します。
サーボアンプ(ドライバー)
プログラマブルコントローラーからの目標値を受けてサーボモーターを目標値どおりに動かすために必要な電力(出力)を供給し、実際にサーボモーターを動かすのがサーボアンプです。
フィードバック信号
エンコーダーでサーボモーターの実際の回転位置や速度を検出し、電気信号でサーボアンプに返して、サーボモーターが指令どおりに動いたかどうかを調べます。この信号をフィードバック信号と呼びます。プログラマブルコントローラーからの目標値とフィードバック信号を比較し、その誤差がゼロに近づくようにサーボアンプが出力を制御します。
クローズド・ループ制御
上記の制御は、フィードバック信号がサーボアンプ側に戻されて閉じたループとなることからクローズド・ループ制御と呼ばれます。サーボモーターの正確な位置・速度・回転力を実現する、サーボモーターのポイントとなる技術です。
サーボモーターの主な用途
サーボモーターを使用する機器
産業用ロボット
電子機器、自動車、食品や医療品などの工場で利用が広がっている産業用ロボットは、関節部分でサーボモーターがアームを動かしています。垂直多関節型ロボットでは5~7軸、水平多関節型のスカラタイプでは4軸にサーボモーターが組み込まれ、ロボットの自由で正確な動きを実現しています。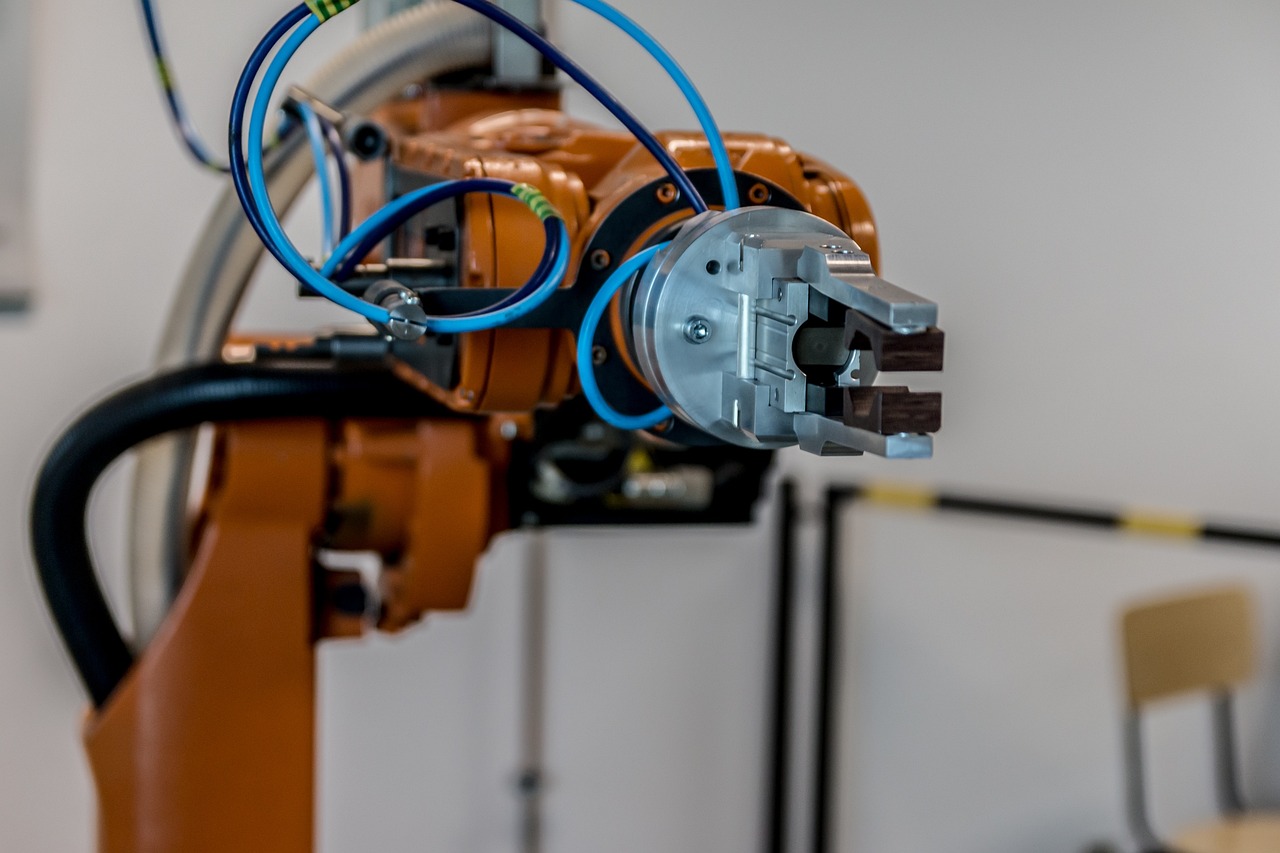
半導体製造装置
半導体チップの製造に用いられる露光装置、成膜装置、エッチャー、ダイサー、ダイボンダー、ワイヤボンダーなどの加工装置には極めて精密な動作が要求されるため、その多くに小容量のサーボモーターが搭載されています。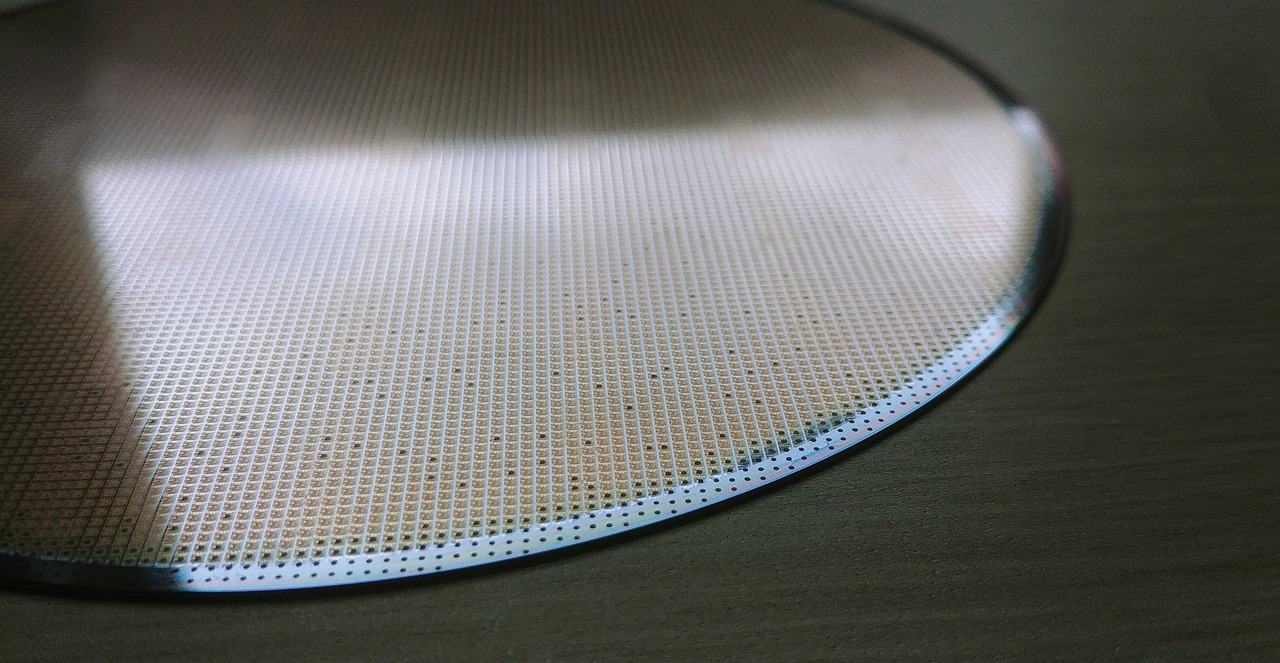
工作機械
家電製品やデジタル機器など身の回りから自動車や鉄道車両、航空機、船などの大きなものまで、多くのの製品の部品もしくはそれを生産するための金型は、金属やプラスチックの素材から切削加工で作られます。この加工を行う工作機械には高速・高精度な加工が求められるため、各動作部分にサーボモーターが使われています。
FPD(フラットパネルディスプレイ)製造装置
FPDの製造では、各工程で大きく薄いガラス基板を高速・正確・クリーンに処理する必要があり、加工や検査のための装置に高精度なサーボモーターが使われています。
金属加工機
上記の工...