今回は、自社工場にロボットシステムを導入し、稼働することを対象にした同システム構築の流れを解説します。
1. 経営者から導入に向けた事前検討を始め、実務担当者による要件の検討へとつなげる
ロボットシステムの構築には、ロボットシステムインテグレータ(SIer:エスアイアー、エスアイヤー)と呼ばれるロボットを取り扱う専門のエンジニアリング企業が存在し、最適なロボットシステムの構想から設計、導入までを幅広く担っています。ロボットシステムの構築は、ユーザー企業とロボットSIer との共同作業で実現していくもので、各工程では両者が密接に連絡を取り合って実施していきます。
2. ロボットSIer とは
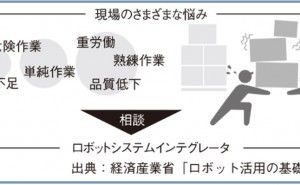
ロボットSIer とは、ロボットシステムの導入提案や設計、構築などを行う事業者のことです(図1、図2)。対応できる業務は事業者によって様々ですが、例えば次のようなプロセスがあります。
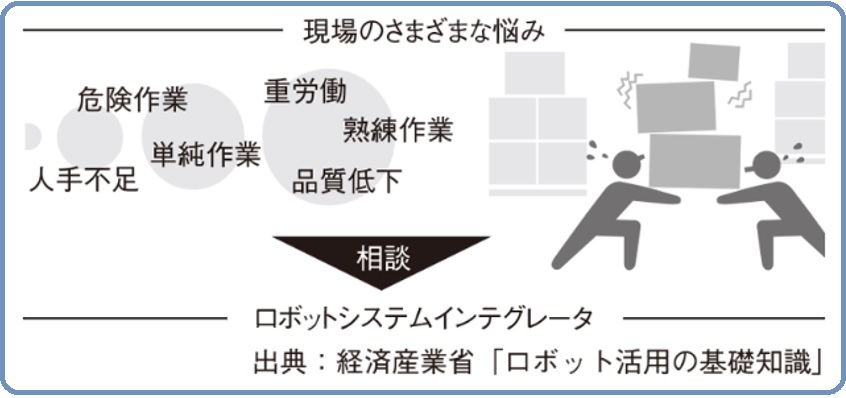
図1.ロボットシステムインテグレータとは
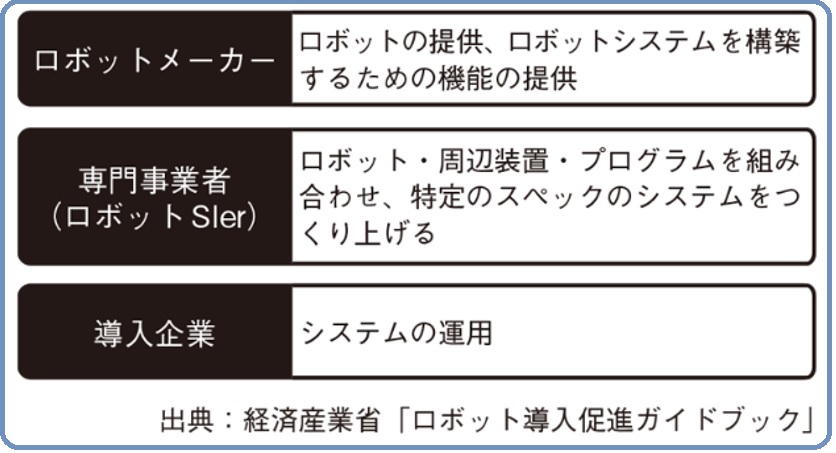
図2.ロボットメーカ、ロボットSIer、導入企業の関係
(1)潜在的ニーズの発掘や課題の明確化
現在の作業工程見直し、潜在的ニーズを発掘。課題を明確にして、解決方法を検討する。
(2)プロジェクト・マネジメント
計画段階から運用開始まで全体をまとめる。
(3)業務別ロボットコンサルテーション
作業工程や衛生面など業務別に異なるニーズに合ったロボットの選定をサポートする。
(4)ロボット設計
作業の内容や目的に応じて、ロボット本体の選定やロボットアームの動かし方、生産ラインの構築など、ロボット全体に関わる設計を行う。
(5)安全設計
ロボット導入によって発生するリスクを解析し、安全柵や安全機器を選定するなど安全規格に沿った設計を行う。
(6)周辺設計
ロボットが稼働する前後のラインや作業工程を必要に応じて見直し、ロボットが作業しやすい周辺環境を設計する。
(7)制御・センシング設計
ロボットの動作を制御するプログラムや必要なセンサの追加設計を行う。
3. ロボットシステム構築の流れ
以下に、ロボットシステム構築の流れを示します(図3)
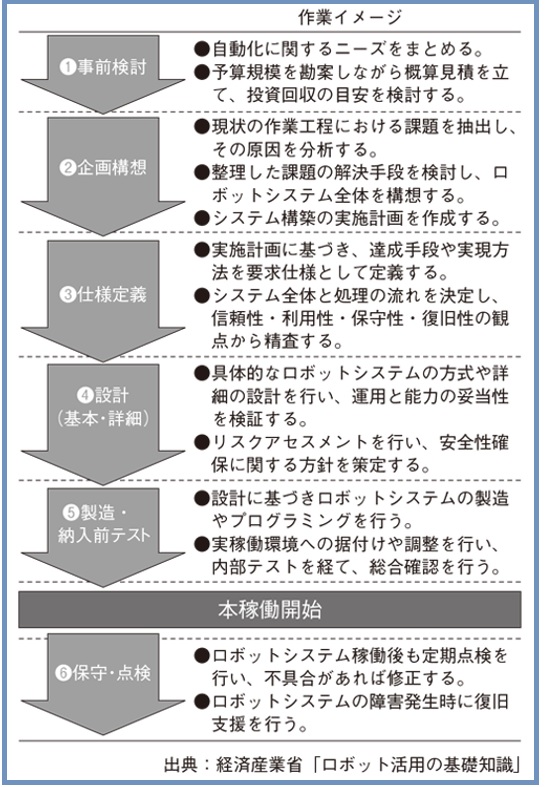
図3.ロボットシステム構築の流れ
【経営者によるロボット導入に向けたイニシアティブ】
(1)ロボット導入イメージの把握
産業用ロボットの最新情報や業界の導入事例を参考にしつつ、自社での導入イメージをつかむ。
(2)経営課題に対応したロボット導入目的の明確化
人手不足の解消、稼働率の向上(24時間化、休みなし)、品質の安定化(作業の均一化)、単純作業の代替など、目的を明確にする。予算と導入時期を設定する。
(3)自動化に関するニーズのまとめ
どのような工程でロボットを活用するかについて考える。業種や生産品目によって、ロボットの活用可能な場面はそれぞれ異なっています。現状の作業工程において、課題になっていることは何かを現場社員が具体的に指摘し、ロボット導入による解決の可能性について検討する。
(4)検討チームの立ち上げ
ロボット導入は、多面的に捉えていくことが必要です。そのためには、社内で導入効果を理解・共有し、より大きな効果を得るための工夫が必要です。そのための検討チームを立ち上げます。
【実務担当者による要件の検討】
(1)対象ワーク、作業の選定
対象ワーク、生産数量、タクトタイム、品種替えの頻度などを書き出して整理します。
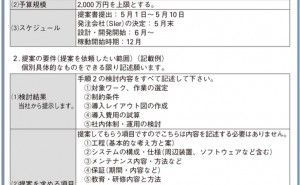
(2)制約条件の整理
設置スペース、動作環境(温度、湿度、気圧、振動など)、ユーティリティ(動力電源、設備電源など)、安全(関連法規など)などの制約条件を書き出して整理します。
(3)導入レイアウト図の作成
ロボットを配置し、前後の設備を再配置します。その上で必要な機器の選定を行い、レイアウトをより具体的に肉付けます。
(4)導入費用の試算
導入レイアウト図に基づいて、ロボット導入費用を算出します。別途、システムインテグレーション費用が必要となります。システムインテグレーション費用とは設計、製作、設置、調整などの費用です。
(5)社内体制・運用の検討
運用担当の候補者を選びます。運用担当者は、保守安全管理を行います。ワークの変更や新たなティーチングが発生した場合のロボット操作などの設定変更まで、自社内で対応できるようにするのが理想です。
基本操作や日常点検だけでなく、運用時にはロボットの動作をプログラミングする「ティーチング」も重要です。以前は、ティーチングは専門家が行うものでした。しかし最近では、専門家でなくてもティーチングができるような機能が色々と登場しています。例えば、アームを手で持って動かすことで動作を覚えさせるダイレクトティーチング機能や、感覚的にプログラミングできるビジュアル化された入力用インターフェイス、動きの始点と終点を入力するだけでよいティーチレス機能など、動作の入力を容...