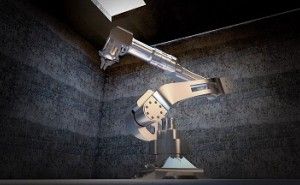
触覚技術が脚光を浴びています。パソコン、家電、携帯端末、自動車、文房具、医療・福祉用品など、人が触る様々な製品に携わる方々からの触覚技術への引き合いが近年急増しているのです。ロボット分野においては、マニピュレーターが実現されています。今回は、マニピュレーターの概要として、人型ロボットの腕部に焦点を当てて解説します。
1.マニピュレーター(manipulator)とは
手で操作する者の意味がマニピュレーターです。マニピュレーターの語句が、一般的に使われる場合は、いくつかの意味があります。
- マニピュレーター:心理学用語では洗脳して、他者の心理を操作する者のこと。
- マニピュレーター:人間の腕を模倣したロボットで、人型ロボットの腕部を指す。手動,油圧,空気圧,電気等によって、駆動します。
- マニピュレーター:電子楽器でシーケンサによりプログラムする人。
上記のbは、更に次の3つに分類できます。
- ①マジックハンド型マニピュレーター(人間が操縦をする前提)
- ②マスタ・スレーブ型マニピュレーター(人間が操縦をする前提)
- ③産業用マニピュレーター
①と②は、人間が立ち入れない環境で使用されることが前提のマニュピレーターです。③は自動制御が前提で、生産ライン等で用いられる産業ロボットの一種です。
2.ロボットマニピュレーターとは
産業用ロボットは、様々な周辺機器で構成されていますが、そのなかでも、ロボットアームのマニュピレーター部分は作業精度、作業速度に影響します。
産業用ロボットの性能や稼働を左右するのがマニピュレーターですが、ロボットマニュピレーターは、装置そのものを指す場合や、複雑なロボットの一部を指す場合があります。ロボットアームの先端はロボットハンドと呼ばれ、手のような働きをしてハンドリング作業を行います。
(1)ロボットマニピュレーターの構造
人間の腕に代わって働くロボットアームの動きは、マニュピレーターの軸数と軸の動きによって決まります。マニピュレーターは動いて作業する腕に相当するもので、一般的に4~7の可動部、回転軸がサーボモーターと減速機につながれています。
一般的なものは、6可動部の6自由度のマニピュレーターです。これは三次元空間上の姿勢と位置を相互にかけあわせて動作することができます。
(2)マニピュレーター搭載ロボットの種類
ロボット技術の進歩には目を見張るものがありますが、工場で人間のように滑らかな作業を行うには、マニュピレーターの技術が最重要です。機械工学分野の専門的知識が必要ですが、マニュピレーターに対する最低限の知識とマニュピレーターが搭載された次のようなロボットの知識を知りましょう。
【直交ロボット】直交ロボットは、直角に組み合わせられた直線マニュピレーター軸で構成されたロボットです。これは、1~4軸などに現場の用途に応じて軸数を増やせます。複雑な動作はできない安価なロボットといえます。設備は小型に配置ができるのでラインレイアウトの自由度は高まります。
【スカラロボット】スカラロボットはマニュピレーター軸とリンクは水平方向に動作するものです。アームの構造から水平多関節ロボットといわれます。軸数は4軸が一般的で、アームが水平方向に旋回する動作と、先端が垂直に上下する動きを組み合わせて稼働します。先端は上下に動きながら対象に対して作業をします。水平方向にはしなやかな動きが可能です。構造がシンプルで高速動作が可能で、先端部分が上下に動作する特徴を生かして、基板への電子部品の実装などが活躍の場です。
【垂直多関節ロボット】マニピュレーターが6軸の垂直多関節のロボットです。ロボットハンドやリンクはサーボモーターで直列に繋がっています。このような構造から、シリアルリンクロボットともいわれます。これは自動化に様々な用途で使えるロボットで、同じ6軸構造でも、対象物を持ち上げられる最大の重さはメーカーによってさまざまです。
【パラレルリンクロボット】パラレルリンクロボットは、リンクと軸で構成するアームを並列に複数配置したマニュピレーター構造になっています。リンクと軸を組み合わせることで、多様な動作が可能で、複数のサーボモーターの出力を1点に集中することができます。ロボットハンドは本体から伸びた3本のアームが先端で一体になった部分に取り付けられます。アームそのものを非常に軽量に作ることができるので、高速に動かすことができます。生産ラインで製品の整列、包装、箱詰めなどに稼働が可能です。
...