【ロボット導入の第一歩 連載記事目次】
- 1. 自社の作業工程に適したロボットの選び方
- 2. ロボットシステム構築の大まかな流れ
- 3. ロボット導入におけるコスト
- 4. ロボット使用事業者に要求される安全
- 5. 協働ロボット
- 6. ピッキングロボット
- 7. 締結・組立作業に対応する直交型ロボット
- 8. 垂直多関節型ロボット
- 9. アシストスーツ
- 10. 無人搬送ロボット
- 11. ロボット導入にかかわる補助金
- 12. ロボットを活用できる人材の育成
第4回 ロボット使用事業者に要求される安全
1.はじめに
産業用ロボットは、労働安全衛生法などにより「計画的」に安全管理をする必要があります。そこで、ロボット使用事業者が、これだけはおさえておきたい安全の知識について紹介します。事業者は、労働者を雇い入れたとき、従事する業務に関する安全衛生のための特別教育が義務付けられています。ロボットの教示作業や検査作業に労働者を就かせるときも、その全員に安全教育を行わなければなりません。なお、「労働安全衛生規則(安衛則)」とは、「労働安全衛生法(安衛法)」で定められた措置を、より詳細な事項に落とし込んだものです。
【この連載の前回:第3回 ロボット導入におけるコストへのリンク】
表1 産業用ロボットに対する要求事項
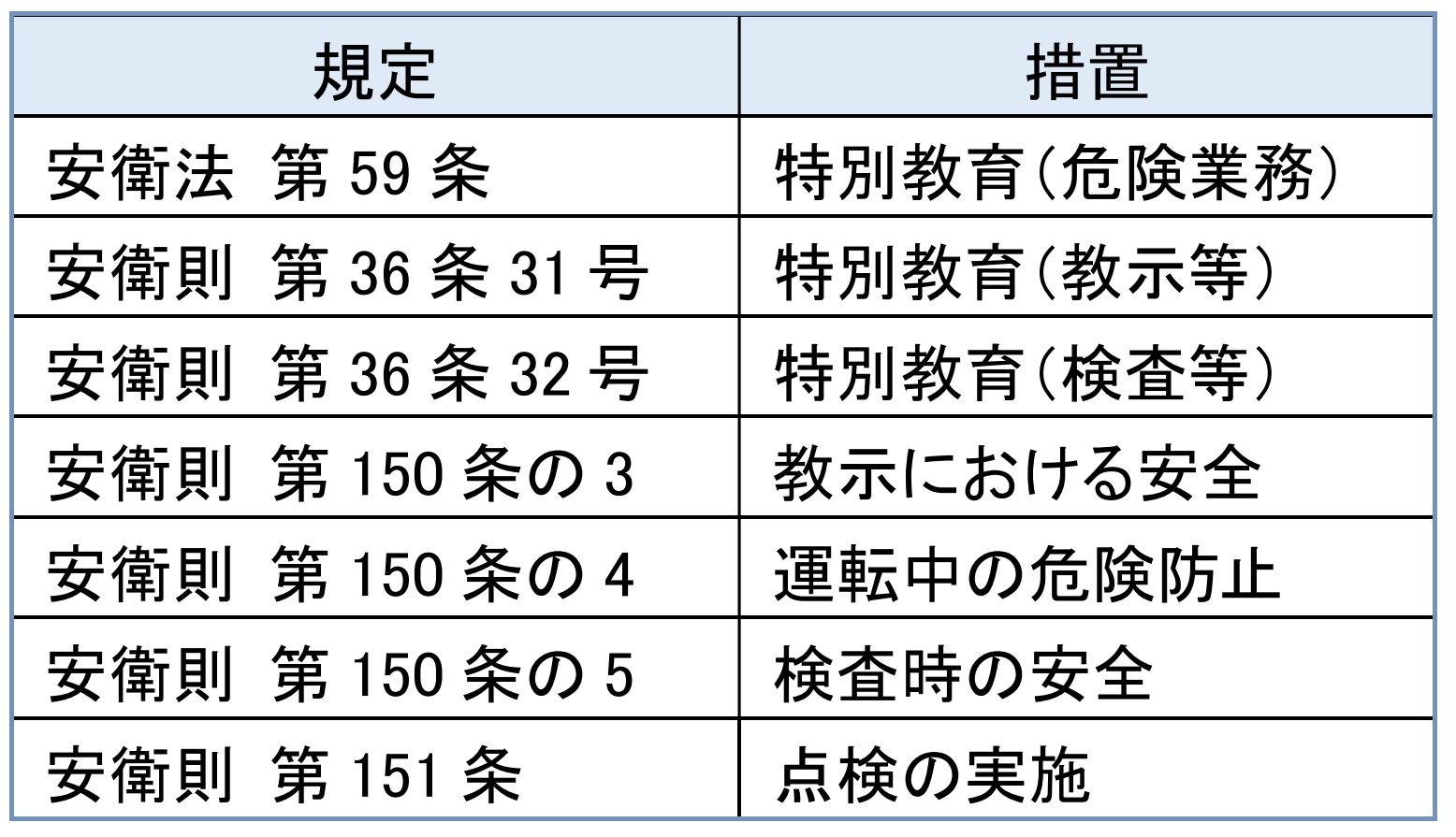
2.労働者の就業にあたっての措置(安衛法 第59条)
- (1)事業者は、労働者を雇い入れたときは、当該労働者に対し、その従事する業務に関する安全又は衛生のための教育を行わなければならない。
- (2)前項の規定は、労働者の作業内容を変更したときについて準用する。
- (3)事業者は、危険又は有害な業務で、労働省令で定めるものに労働者をつかせるときは、当該業務に関する安全又は衛生のための特別の教育を行わなければならない。
3.教示等に関する特別教育(安衛則 第36条31号)
産業用ロボットの可動範囲内において、当該産業用ロボットについて行うマニプレータの動作の順序、位置若しくは速度の設定、変更若しくは確認又は産業用ロボットの可動範囲内において当該産業用ロボットについて教示等を行う労働者と共同して、当該産業用ロボットの可動範囲外において行う当該教示等に係る機器の操作の業務。
4.検査等に関する特別教育(安衛則 第36条32号)
産業用ロボットの可動範囲内において行う当該産業用ロボットの検査、修理若しくは調整若しくはこれらの結果の確認又は産業用ロボットの可動範囲内において、当該産業用ロボットの検査等を行う労働者と共同して、当該産業用ロボットの可動範囲外において行う当該検査等に係る機器の操作の業務。
「安衛則 第2編 安全基準 第9節 産業用ロボット」には、次のように記載されています。
5.教示等における安全(安衛則 第150条の3)
事業者は、産業用ロボットの可動範囲内において当該産業用ロボットについて教示等の作業を行うときは、当該産業用ロボットの不意の作動による危険又は当該産業用ロボットの誤操作による危険防止のため、次の措置を講じなければならない。
ただし、第1号及び第2号の措置については、産業用ロボットの駆動源を遮断して作業を行うときは、この限りでない。
(1)次の事項について規程を定め、これにより作業を行わせること。
- イ.産業用ロボットの操作の方法及び手順
- ロ.作業中のマニプレータの速度
- ハ.複数に作業を行わせる場合の合図の方法
- ニ.異常時における措置
- ホ.異常時に産業用ロボットの運転を停止した後、これを再起動させるときの措置
- ヘ.その他産業用ロボットの不意の作動による危険又は産業用ロボットの誤操作による危険を防止するために必要な措置
(2)作業に従事している労働者又は当該労働者を監視する者が、異常時に直ちに産業用ロボットの運転を停止することができるようにするための措置を講ずること。
(3)作業を行っている間産業用ロボットの起動スイッチ等に作業中である旨を表示する等作業に従事している労働者以外の者が、当該起動スイッチ等を操作することを防止するための措置を講ずること。
6.運転中の危険の防止(安衛則 第150条の4)
事業者は、産業用ロボットを運転する場合(教示等のために運転する場合及び運転中に次条に規定する作業を行わなければならない場合において運転するときを除く)において、当該産業用ロボットに接触することにより、労働者に危険が生ずる恐れのあるときは、柵又は囲いを設ける等当該危険を防止するための措置を講じなければならない。
7.検査時の安全(安衛則 第150条の5)
事業者は、産業用ロボットの可動範囲内において、当該産業用ロボットの検査、修理、調整(教示等に該当するものを除く)、掃除若しくは給油又はこれらの結果の確認の作業を行うときは、当該産業用ロボットの運転を停止するとともに、当該作業を行っている間当該産業用ロボットの起動スイッチに錠をかけ、当該産業用ロボットの起動スイッチに作業中である旨を表示する等当該作業に従事している労働者以外の者が当該起動スイッチを操作することを防止するための措置を講じなければならない。
ただし、運転中に作業を行わなければならない場合において、当該産業用ロボットの不意の作動による危険又は誤操作による危険を防止するため、次の措置を講じたときは、この限りでない。
(1)次の事項について規程を定め、これにより作業を行わせること。
- イ.産業用ロボットの操作の方法及び手順
- ロ.複数に作業を行わせる場合の合図の方法
- ハ.異常時における措置
- ニ.異常時に産業用ロボットの運転を停止した後、これを再起...