【ロボット導入の第一歩 連載記事目次】
- 1. 自社の作業工程に適したロボットの選び方
- 2. ロボットシステム構築の大まかな流れ
- 3. ロボット導入におけるコスト
- 4. ロボット使用事業者に要求される安全
- 5. 協働ロボット
- 6. ピッキングロボット
- 7. 締結・組立作業に対応する直交型ロボット
- 8. 垂直多関節型ロボット
- 9. アシストスーツ
- 10. 無人搬送ロボット
- 11. ロボット導入にかかわる補助金
- 12. ロボットを活用できる人材の育成
第6回 ピッキングロボット
1.はじめに
ピッキングとは、必要なワーク(品物等)を集める(ピックアップする)作業を指します。自動車工場などで、車を組み立てる際に必要な部品を部品箱からピックアップする作業や、商品を配送先毎に仕分けするためにピックアップする作業などがピッキングと呼ばれます。ピッキングロボットは、様々な製造現場でワークを取り出して移動するといった作業を、人間に代わって行っています(図1)。

図1 オカムラ RightPick2
これまでは、ロボットと作業者は安全柵で作業エリアを分けないといけなかったため、広い設置スペースを必要としていました。しかし、技術の進展とともにロボットの小型化などが進んだことや、法規制の緩和により、安全柵がなくても人とロボットの共同作業が可能になったことから、協働ロボットが誕生し、ピッキングロボットの活躍の場も広がりました。
2.ピッキングロボット導入のメリット
ピッキングロボット導入のメリットは、作業精度が良く、ミスが少ないため作業の質を一定に保てることです。さらに人手に比べると作業効率が良く、重いものを運ぶなど過酷な環境、危険な環境での作業も可能であることと、熟練者を単純作業に回すことがなくなるので、作業の割り当てが効率的になります。ピッキング作業は、物流業務の中でもミスの多い工程の一つです。
また、商品を出荷最小単位で管理するピースピッキングでは、多くの人為的ミスが発生してしまいますが、ピッキングロボットを導入することで、このようなミスを減らすことができます。これまでピッキングロボットの対象は、場所が固定的で、しかも作業工程やピッキングするものがパターン化されているケースが多く、ピッキングロボットでは細かなワークを識別することは難しいとされていました。しかし、最新のピッキングロボットは、AI(人工知能)技術を用いてワークを立体的に素早く認識し、ワークを最適な動作で処理することが可能になりました。
3.ばら積みピッキングロボット
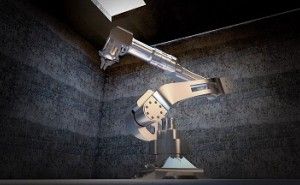
ばら積みピッキングとは、部品箱などにバラバラに積み上げられた状態のワークをピックアップする作業のことを指し、その作業を行うロボットをばら積みピッキングロボットと呼びます(図2)。

図2 ファナック バラ積みロボット
ばら積みピッキングロボットは、基本的にカメラ(センサ)+アーム+処理システムの3つで構成されています。人間がばら積みピッキングをする場合は、目でワークを認識し、手でワークをピックアップします。そして人間はこの時に、ワークがどのような向きで、どういった角度で腕を伸ばせば良いか、どこを掴めばよいかを考えます。
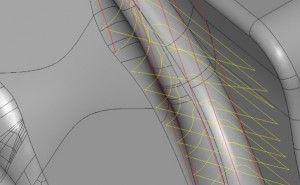
これらの動作をロボットで実現するためには、目の代わりのカメラ(センサ)+手の代わりにワークをピックアップするロボット+脳の代わりにロボットを制御する処理システムが必要になります。カメラの場合は通常3Dカメラを使用し、撮影した3D画像情報と事前に登録したワークの3Dデータを照らし合わせてマッチングを行い、ワークの3次元情報を取得します。レーザーセンサの場合は、レーザー光を照射し、対象となるワークの形状や位置情報などの3次元情報を取得します。
これらの技術を用いて、対象ワークの位置を把握するだけでなく、ワークの向きや形状、ピッキングする際に干渉しそうな他のワークや通い箱などのワーク周辺の物体の位置も把握し、スムーズにピッキングできるように各種の情報を取得します。
対象となるワークが特殊な形状をしていたり、イレギュラーな向きだったりした場合、正しく掴めない可能性があります。この問題に関しては、物体認識で得られた情報を基に、ワークの形状や向きに合わせてアームの角度を調整するプログラムを用意することで、ピッキング精度を向上することが可能です。
また、硬い材質のワークの場合には、荷物を崩すことでピックアップしやすい向きになるようにする方法なども行われます。これらの判断は、AIやディープラーニングによってロボットに任せることが可能です。ワークを掴むときには、予め安定的に掴めるポイントを設定しておき、カメラ等で取得したワークの座標・姿勢の状態から、把持ポイントを推定して掴んだり、接地面を真空状態にして吸い付けたりして移動さ...