【ロボット導入の第一歩 連載記事目次】
- 1. 自社の作業工程に適したロボットの選び方
- 2. ロボットシステム構築の大まかな流れ
- 3. ロボット導入におけるコスト
- 4. ロボット使用事業者に要求される安全
- 5. 協働ロボット
- 6. ピッキングロボット
- 7. 締結・組立作業に対応する直交型ロボット
- 8. 垂直多関節型ロボット
- 9. アシストスーツ
- 10. 無人搬送ロボット
- 11. ロボット導入にかかわる補助金
- 12. ロボットを活用できる人材の育成
第10回 無人搬送ロボット
1.はじめに
無人搬送ロボットとは、人が操縦しなくても自動で走行することができる搬送ロボットのことです。従来から、工場などで一般的に使われてきた無人搬送車(AGV)も、無人搬送ロボットの一つです。無人搬送車(AGV)は、磁気テープなどの誘導方式により、必要な部品を必要な場所に運ぶというものです。その後、自律走行が可能な自律走行搬送ロボット(AMR)が登場しました。
決められたルート上を走行する無人搬送車(AGV)に対して、自律走行が可能な自律走行搬送ロボット(AMR)は、次世代AGVなどと呼ばれたりもしています。
2.無人搬送車(AGV)
AGVとは、Automation Guided Vehicleの略で、JIS D 6801では、「一定の領域において、自動で走行し、荷など人以外の物品の搬送を行う機能をもつ車両で、道路交通法に定められた道路では使用しないもの」とされています。磁気やレーザー、光学などの誘導方式に従って決められたルート上を走行します。
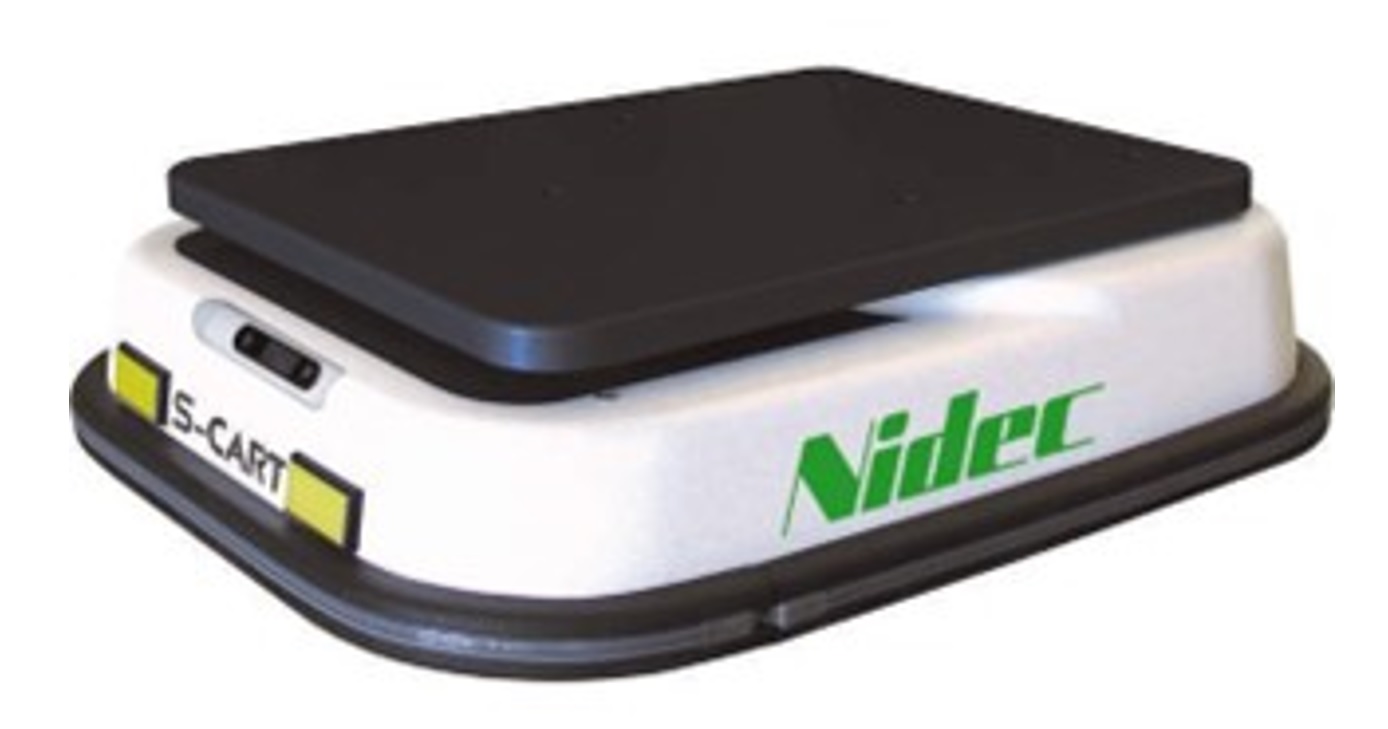
図1.無人搬送ロボット(日本電産シンポS-CART-V100)
3.自律走行搬送ロボット(AMR)
AMRとは、Autonomous (collaborative) Mobile Robotの略で、誘導体を必要とせずに、搭載されたLiDARにより壁や柱までの距離を計測して、自律走行をすることができます。周囲の環境地図を作成しながら、その地図上で自己位置を推定する方式を採用しています。JIS D 6802では、「その稼働領域を人と共存、共用する無人搬送車を用いて、物の搬送,荷役を行う自動搬送システムである」とされています。

図2.自律走行搬送ロボット(モバイル インダストリアル ロボットMiR250)
4.走行方式の変遷
無人搬送車(AGV)の走行方式は、床に設置された金属線に微弱交流電流を流し、磁場をセンサーで検出して移動する電磁誘導方式や、磁性体の棒や磁気テープを床に設置し、磁気センサーで読み取って誘導する磁気誘導方式により、搬送ルートが決められていました。
その後、床や天井に描かれたQRコードやARマーカーなどの記号を読み取り、自分の位置を把握する画像認識方式や、建屋内の壁や柱に反射板を取り付け、レーザーの反射で自己位置を推定し、自律走行するレーザー方式が現れました。
そして、自律走行搬送ロボット(AMR)では、カメラやレーザーなどのセンサーとエンコーダやジャイロスコープを使って自己位置推定を行い走行するSLAM(スラム:Simultaneous Localization and Mapping)方式(自己位置推定・環境地図)が採用されています。この方式は、誘導体などの設置が不要で、自律走行が可能となりました。
5.Visual SLAMとLiDAR SLAM
SLAMには、カメラで撮影した画像処理を基にするVisual SLAMと、LiDARで計測した点群データを基にするLiDAR SLAMがあります。
Visual SLAMとは、カメラで撮影された映像から、環境地図、場所の3次元情報とカメラの位置姿勢を同時に推定する技術で、カメラは単眼カメラ、ステレオカメラなどが利用されています。一方、LiDAR は、SLAM LiDAR (Light Detection and Ranging) というレーザーセンサー (距離センサー)で取得した周囲の点群データを基に、2次元環境地図をリアルタイムに生成し、地図上での自己位置推定を同時に行います。このLiDARの技術は、自動運転やドローンにも採用されています。
6.無人搬送ロボットの安全対策
最近の自律走行搬送ロボット(AMR)や無人搬送車(AGV)は大型のものもあり、大きい製品・部品では、1トンを超えるものまで搬送できます。そのために、緊急時に要求される機能として、無励磁作動形ブレーキが使われています。
無励磁作動形ブレーキとは、非通電時に、スプリングの力によって作動する電磁ブレーキで、停電時の緊急制動、長時間の停止状態の保持、機械の惰走防止などに優れた性能を発揮します。静かな制動音、長寿命、コンパクトで大トルク、確実で安定した制動力、手動解放可能などの長所を備えています。
7.無人搬送ロボットの導入効果
自律走行搬送ロボット(AMR)を導入することで、作業者の移動距離を減らすことができ、移動距離が減れば、割り当てる人員を減らすことも可能です。実際に作業者を半減した事例もあります。自律走行搬送ロボット(AMR)は、人と協働するために開発されたロボットです。
...