【ロボット導入の第一歩 連載記事目次】
- 1. 自社の作業工程に適したロボットの選び方
- 2. ロボットシステム構築の大まかな流れ
- 3. ロボット導入におけるコスト
- 4. ロボット使用事業者に要求される安全
- 5. 協働ロボット
- 6. ピッキングロボット
- 7. 締結・組立作業に対応する直交型ロボット
- 8. 垂直多関節型ロボット
- 9. アシストスーツ
- 10. 無人搬送ロボット
- 11. ロボット導入にかかわる補助金
- 12. ロボットを活用できる人材の育成
第12回 ロボットを活用できる人材の育成
1.はじめに
昨今、ロボット活用のニーズが高まっている中で、ロボットを活用できる人材の確保・育成は重要な課題であり、早期に一人前の人材を育成することが望まれています。
社内にロボットや周辺装置を理解し、扱える従業員を育成するためには、ロボットを活用できる人材として保有すべき技術体系と熟達レベル、すなわち人材のスキル標準を策定し、浸透させることにより、高度専門人材やロボットシステムを統括する人材の育成を後押しすることが必要です。
講習を受けることはもちろんですが、「自分たちでもロボットを扱える」と思える現場づくりが重要です。ロボットを活用できる人材の育成を、どのように進めていくかについて紹介します。
【この連載の前回:第11回 ロボット導入にかかわる補助金へのリンク】
2.ロボットSEスキル標準の整備
ロボットを活用できる人材育成には、ロボットSE(システムエンジニア)スキル標準の整備が必要です。
(1)これから育成する人材に対して「キャリア目標」を示します。
- 職種:どのような職種や専門分野があるのか。
- レベル:現在の位置はどこか、目標はどこか。
(2)育成するために「習得すべき内容」を示します。
- タスク:どのような業務ができればよいのか。
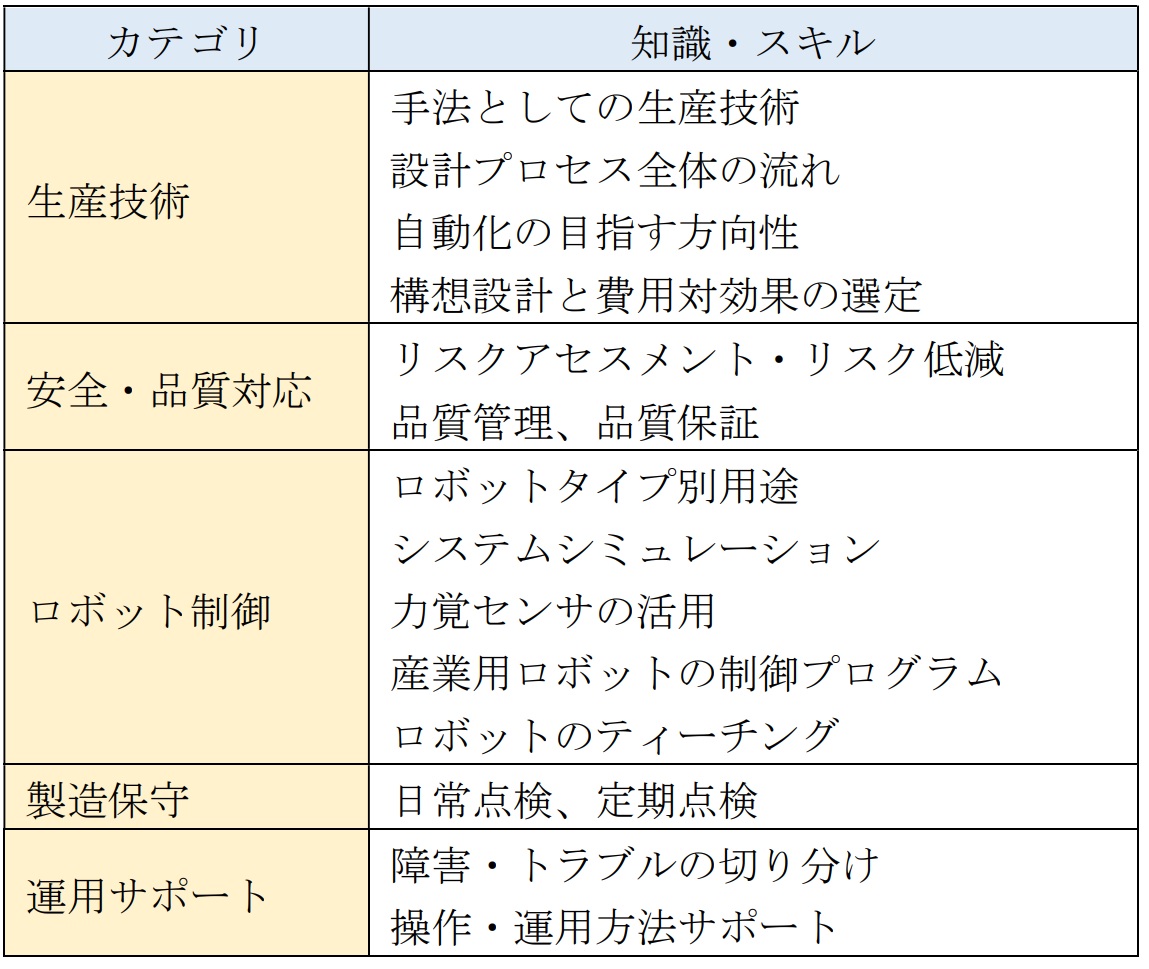
- 知識・スキル:何を知っていればよいのか。
表1に「キャリア目標」を、表2に「習得すべき内容」を、それぞれ示します。表1の〇はサポート要員として参画可能な領域を、△は主担当として参画できる領域を、それぞれ示しています。
表1 キャリア目標【出典】みずほ情報総研「ロボットSEスキル標準」より抜粋
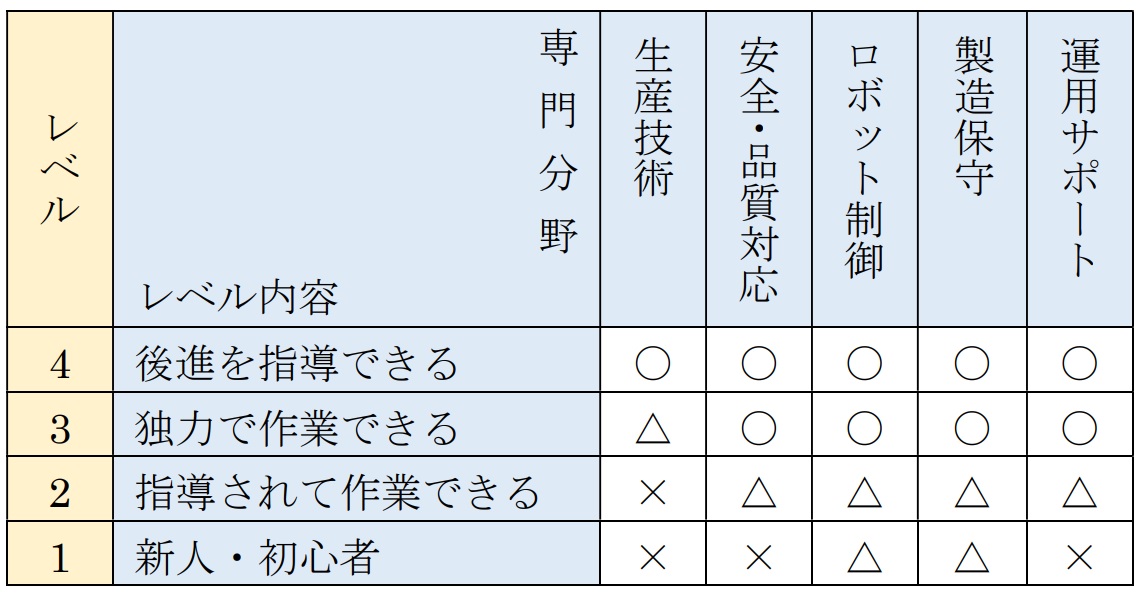
表2 習得すべき内容【出典】みずほ情報総研「ロボットSEスキル標準」より抜粋
3.RIPS
RIPS(Robot system Integration Process Standard)とは、正式名称を「ロボットシステムインテグレーション導入プロセス標準」といい、2017年に経済産業省と日本ロボット工業会によって検討・提案されました。ロボットシステムの導入において、最適な手順でシステム導入できる工程管理手法です。
この「RIPS」では、作業工程及び作成するドキュメントを標準化することにより、作業の見える化を行なっています。ロボットシステムのスムーズな構築を目的としているので、こちらもぜひ参考にしてください。
4.ティーチングなどの必要な知識
習得すべき内容の中で、特に必要な知識にロボットのティーチングとロボットシステムのシミュレーションがあります。その他に、エンドエフェクタやコンベアトラッキングの知識なども重要です。
(1)ロボットのティーチング
ロボットのティーチングには、2つの方法があります。1つは、ティーチングBOXでロボットを動作させるオンライン・ティーチングです。そしてもう1つは、PCを用いて3Dデータ上でロボットを動作させるオフライン・ティーチングです。どちらの方法も、記録・操作方法は、ロボットメーカーや機種によって異なります。
また、この2つの方法以外に新たに登場したティーチング方法として、ダイレクトティーチングがあります。ダイレクトティーチングは、人が直接ロボットを押し・引きして動かす方法で、ロボット操作未経験者でも、直感的に使える利点があり、精密な動作を必要としない用途では、有効な手段です。
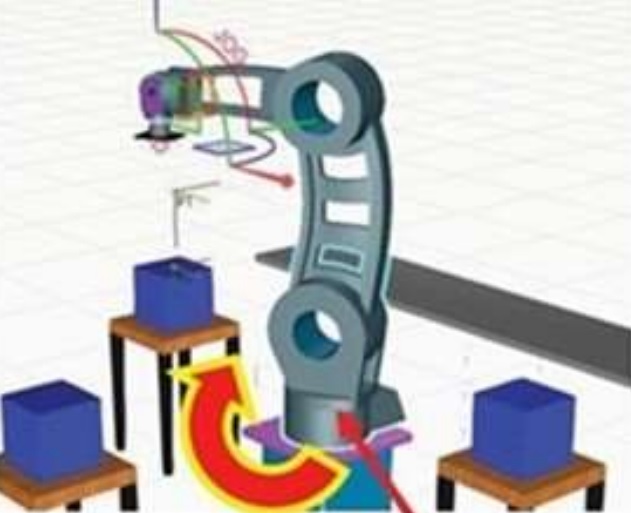
(2)ロボットシステムのシミュレーション
ロボットシステムのシミュレーションでは、PC画面上で作業領域を設定し、eカタログから、必要なコンポーネントを選んで作業領域内の所定の位置に配置できます。コンポーネントの配置は、X=0、 Y=0、 Z=0のように座標数値を入力するか、赤、青、緑の矢印をクリック、ドラッグして行います。
コンポーネントでeカタログにないものは、CAD図面から登録することができます。ロボットの各軸を動作させて位置を決め、ロボットのティーチング点を登録します。このようにして、ロボットシステムのシミュレーションができます。この時点で、登録メーカーのロボットプログラムが自動的に作成され、こ...