2001年の品質工学会研究発表大会で九州松下電器株式会社の井口勝夫さんが発表した「シュレッダー刃形状小型化における全体最適設計を事例とした品質工学の教育・普及」の概要を紹介します。
1.はじめに
業務用小型クロスシュレッダーの開発・設計段階で、電源事情のよくない諸外国での稼動を想定し、切れ味・省エネ・低騒音・低振動の全体をバランス良く実現する刃形状の基本設計を、短納期で合理的に導くことを課題としました。
2.実験方法
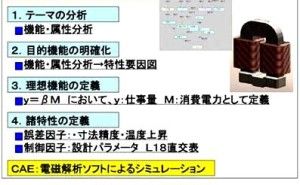
「少ないエネルギー投入量で多くの枚数をカットすること」を基本機能と考え、電源電圧を誤差因子として±20%変化させ、制御因子としては基準円寸法、刃高さ、刃R1、2、刃入射角、刃板厚、刃先ずらしの7因子を直交表L18に割り付け、合計18通りの試験機に対して、用紙1、2、3枚を投入しカットに要した電流値、電圧値、時間を計測しました。
3.実験結果
本実験の結果を基に最適条件と初期条件の組み合わせで再現実験を行ったところ、SN比、感度とも約3dbの改善が認められ、これは初期条件に対し耐電源変動性と省エネ性がそれぞれ約2倍に同時改善されたということを意味します。