1. 技術開発活動でのロバストパラメータ設計の位置づけ
前回の(その1)ロバストパラメータ設計では,製品設計段階で活用される品質改善手法としてのパラメータ設計と技術開発段階で活用される品質創造技法としてのロバストパラメータ設計の違いを明らかにし,技術開発プロセスの中でのロバストパラメータ設計の位置づけを示しました.今回は技術開発活動の全体像を示した上で,ロバストパラメータ設計の位置づけを示します.
2. 技術開発活動の全体像
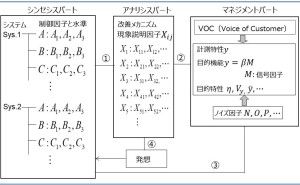
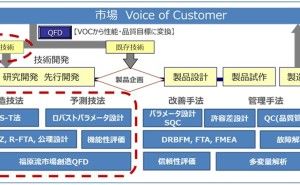
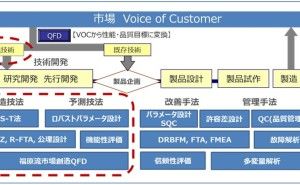
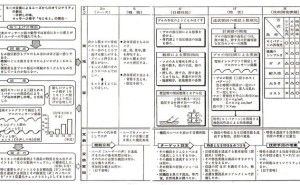
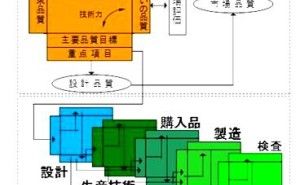
図1に技術開発活動の全体像を示します.技術開発活動の中で定量データを扱う活動は大きく3つのパートから構成されます.以下に3つのパートについて説明します.
【マネジメントパート】
技術開発のスタート段階で性能とロバスト性の目標が設定されます.性能は,お客様の要求であるVOC(Voice of Customer)を計測特性yとして定義したとき,yの狙い値で与えられます.例えば複写機やカメラのような画像機器では「きれいな画像」というVOCを濃度や寸法などの計測特性で定量的に定義し,その狙いの値を目標設定します.ここで,計測特性yの値を変える入力が存在する場合は,y=βMで表現される目的機能を定義することができます.例えば,原稿画像の濃度を入力Mとして,出力yを印刷した画像の濃度として入出力関係を定義します.
さらに,市場では計測特性yの値をばらつかせる環境温度や劣化などのノイズ因子が必ず存在します.よって,様々なノイズ因子を与えた時の計測特性yの変化量の許容差がロバスト性の目標として設定されます.ロバスト性はSN比ηや分散Vによって定量化されます.性能やロバスト性の評価指標を合わせて目的特性と呼ぶことにします.
ここで,技術開発が完了した後の製品設計段階における品質改善活動で,目標とするロバスト性を確保できる目処がついている場合は,ロバスト性を目標設定対象とはせずに性能目標の達成のみを目指すことも可能です.ただし,ロバスト性の確保が不十分のまま製品設計段階に入ると大きなリスクとなるので注意が必要です.それについては次回に説明します.
計測特性とロバスト性の評価方法を定義することは目標達成度を測るものさしを設定することに相当します.ものさしの定義と到達レベルの設定は技術者の判断で実施するのではなく,マネジメントの関与が必須であることから,これらの活動要素をマネジメントパートとしました.
【シンセシスパート】
性能とロバスト性の目標を達成するためには必ずシステム(あるいはサブシステム)を選択あるいは考案し,そのシステムを構成する設計パラメータ(制御因子)の水準を変える活動が必要です.システム選択及び考案と制御因子の水準変更によって,性能とロバスト性の値を目標達成に向けて変える活動要素をシンセシスパートと名付けました.
【アナリシスパート】
多くの制御因子の水準を変えることによって,目的特性の値が必ず変化します.制御因子の水準変更と,その結果としての目的特性の値の変化の間には何らかのメカニズムが働いているはずです.そのメカニズムを記述するのが,物性値,分析データ,センシングデータ,シミュレーションの中間特性などです.これらメカニズムを記述する因子を現象説明因子と呼ぶことにします.現象説明因子を取り上げて,目的特性の値が変化するメカニズムを把握する活動要素をアナリシスパートと名付けました.
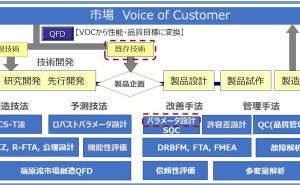
以上3パートの因果関係は,シンセシスパート→アナリシスパート→マネジメントパートの流れとなります.これらの因果関係を把握することが定量的なデータを扱う技術開発活動の骨格といえます.(①と②で示した)
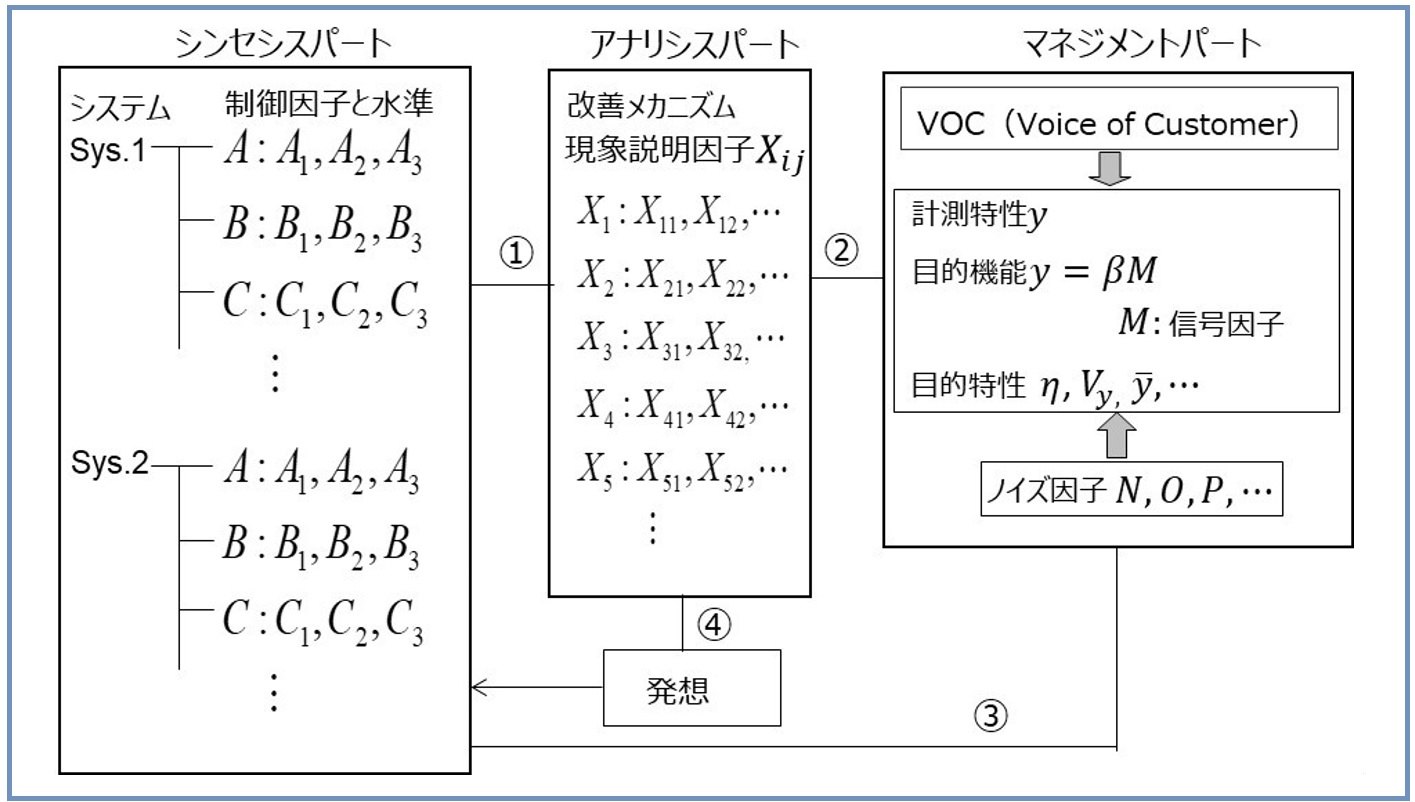
図1 技術開発の全体像
【出典】タグチメソッドによる技術開発 ~基本機能を探索できるCS-T法~ 日科技連
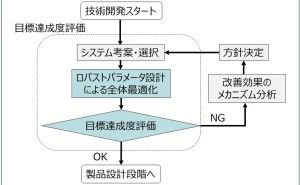
3.技術開発の原動力
前回も触れたように,図1の技術開発活動において,既存の制御因子の水準の最適化だけで目標達成できるケースはほとんどありません.そこで,新たなシステムや制御因子を考案する活動が必須となります.それを図1の④で示しました.従来の技術開発では,試作によって顕在化する不具合のメカニズムを調査する活動にリソースを投入することが一般的でした.それは,図1のノイズ因子の水準変更によって生じる目的特性の値の変化のメカニズムを把握する活動に相当します.
一方,ロバストパラメータ設計を起点とする技術開発は,図1の3つのパートの因果関係を把握することを目的とします.従来から実施されている不具合メカニズムの解明ではなく,改善メカニズムの解明です.不具合は複数あることが多く,またトレードオフ関係にあることが多いので,不具合メカニズムを把握しても,目的機能を大きく改善できるシステムや制御因子を考案することは困難なのです.それに対して,目的機能の改善効果はシステム全体のトータルな改善効果なので,そのメカニズムを把握することによって,大きな改善効果を持つシステムや制御因子を考案できる可能性が高まります.それが図1の④です.
図1において,マネジメントパートにある目的特性とシンセシスパート...






















-守・破・離ー")